Vehicle Autonomous Tracking with EKF, LQR & SLAM
CMU 24-677 — Advanced Control Systems Integration
Role: Estimation & Control Lead • Tools: MATLAB/Simulink, ROS
Introduction / Problem
This project focused on enabling an autonomous ground vehicle to track a reference path in an urban-like environment using noisy sensor data. Reliable localization and robust lateral control are critical for safety and traffic efficiency as autonomous vehicles become more common in real-world scenarios.
Methods
- Modeled the vehicle using a nonlinear bicycle model and linearized it around operating points.
- Implemented an Extended Kalman Filter to fuse wheel odometry, IMU, and range sensor measurements.
- Designed a discrete-time LQR controller for lateral and heading tracking based on the linearized dynamics.
- Integrated a SLAM back-end so that the controller could operate with an evolving map.
Results
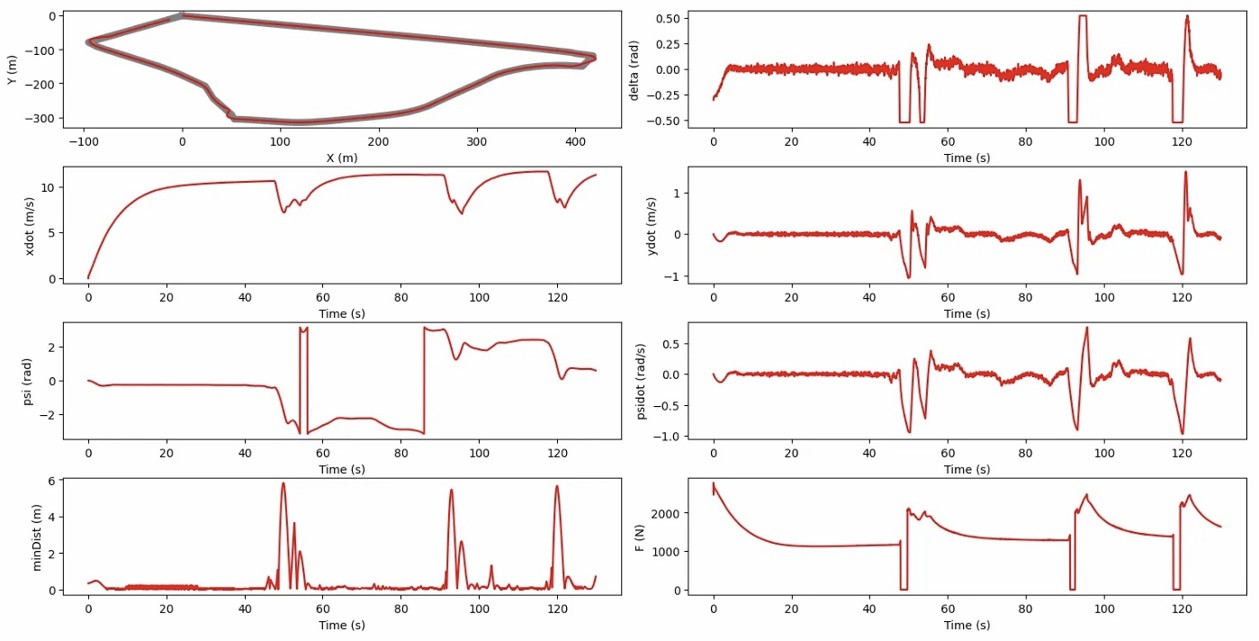
The closed-loop system achieved stable path tracking with lateral error under 0.15 m RMS on curved segments, even with injected sensor noise and small disturbances. Compared to a tuned PID baseline, the LQR controller reduced overshoot and improved settling time. The EKF-SLAM pipeline maintained consistent pose estimates, which was essential for the controller’s performance.
My Contribution
I implemented the full estimation–control pipeline, including EKF derivation, LQR design, and ROS-based integration. I also designed experiments and evaluation metrics, and produced trajectory and error plots to compare different controller tunings.
Artifacts
- Simulation video of autonomous tracking.
- MATLAB/Simulink models and ROS launch files.
- Technical report summarizing modeling, design, and results.