Engineering Portfolio
Robotics & Control Systems — Carnegie Mellon University
I design and implement feedback control, estimation, and motion planning algorithms for autonomous vehicles and legged robots. My work focuses on turning mathematical models into robust, real-time systems that move safely in uncertain environments.
Ultimately, I am interested in using robotics to make transportation and logistics safer, more accessible, and less labor-intensive, especially in challenging or high-risk scenarios.

About Me
I am a graduate student in Mechanical Engineering at Carnegie Mellon University, focusing on robotics and control. I enjoy working at the intersection of modeling, estimation, and real-time control, where theory has to survive noisy sensors, hardware limits, and tight deadlines.
Recently, I have been working on autonomous vehicle tracking using EKF and LQR, remote tele-operation platforms for logistics during epidemics, gait transition control for quadruped robots, and pneumatic-based flexible suspensions. I am especially motivated by problems where better control and autonomy can directly improve safety or human workload.
- Technical interests: State estimation (EKF/SLAM), optimal control (LQR/MPC), reinforcement learning for locomotion, mechatronic system design
- Tools: ROS/ROS2, Gazebo, MATLAB/Simulink, Python, C++, Git, LaTeX
Projects & Experiences
Vehicle Autonomous Tracking with EKF, LQR & SLAM
CMU 24-677 — Advanced Control Systems Integration
Designed an EKF–LQR pipeline so an autonomous ground vehicle can track paths robustly under noisy sensing, using SLAM-based localization in an urban-like environment.
Remote Driving Contactless Logistics Platform for Epidemic Scenarios
Shanghai Jiao Tong University — Team Project

Built a ROS-based teleoperation platform that lets operators remotely drive logistics vehicles in high-risk environments, reducing exposure during epidemic scenarios.
AutoReFly: Autonomous Recovery of a Vehicle-Mounted UAV
Mechatronics & Vibration Control Design
We presents AutoReFly, a Crazyflie-based system that uses nonlinear MPC with safety constraints to enable tracking, obstacle avoidance, payload delivery, and dynamic landing. Controllers are developed and tuned in simulation, then deployed on hardware with Lighthouse localization. The UAV performs its final landing on a moving UGV platform, demonstrating a full simulation-to-real pipeline for safe autonomous recovery.
AI Path Planning for Laser Cutting with Priority Constraints
Mechatronics & Vibration Control Design
Developed an AI-driven tool-path planning algorithm for laser cutting with nesting and priority constraints. Built a GTSP-to-TSP conversion pipeline and a deep reinforcement learning model that generates efficient cutting sequences significantly faster than classical heuristics on large industrial cases.
Seamless Gait Transition via Optimal Control & Reinforcement Learning
Quadruped Locomotion Research

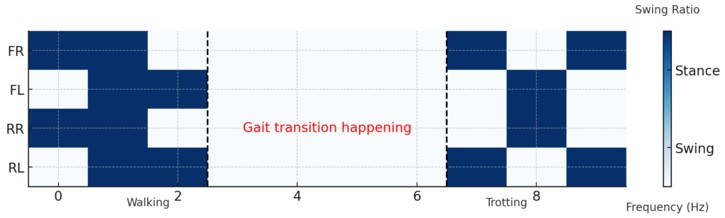
Achieving efficient quadrupedal locomotion requires seamless gait learning transitions to adapt to varying speeds and terrains. This study explores three methodologies for gait learning in a simulated quadruped robot: Time Varying Linear Quadratic Regulator (TVLQR), Reinforcement Learning (RL), and Supervised Learning (SL). The TVLQR approach faced challenges in handling the discontinuous contact dynamics, leading to instability. The RL framework, utilizing PPO with task and auxiliary rewards, showed promise in learning adaptive policies. The SL approach, employing behavior cloning of an expert MPC policy, demonstrated effective gait learning but lacked robustness to disturbances. These findings contribute to the development of versatile and robust locomotion strategies for quadruped robots.
Pneumatic Artificial Muscle-based Flexible Suspension
Mechatronics & Vibration Control Design

Prototyped a PAM-based suspension that can adapt stiffness via pressure control, reducing transmitted vibration compared to a passive spring–damper setup.
Resume
This portfolio is accompanied by a concise one-page resume tailored to robotics and control roles. The resume highlights technical skills, research experience, and relevant industry internships.
View 1-page Resume (PDF)Contact
- Email: jingboz2@andrew.cmu.edu (school) jbzh23@gmail.com (personal)
- LinkedIn: https://www.linkedin.com/in/jingbo23zhang/
- GitHub: https://github.com/jbzhang23